Referat. Закон збереження імпульсу. Розрахунок реактивної сили (тяги) Застосування реактивних двигунів
- Будь-яке завдання у механіці можна вирішити з допомогою законів Ньютона. Проте застосування закону збереження імпульсу у часто значно спрощує рішення. Велике значення має закон збереження імпульсу на дослідження реактивного руху.
Який рух називається реактивним?
Під реактивним рухом розуміють рух тіла, що виникає при відокремленні деякої його частини з певною швидкістю щодо тіла, наприклад, при закінченні продуктів згоряння із сопла реактивного літального апарату. При цьому виникає так звана реактивна сила, що повідомляє тілу прискорення.
Спостерігати реактивний рух дуже просто. Надуйте дитячу гумову кульку і відпустіть її. Кулька стрімко підніметься вгору (рис. 5.4). Рух, щоправда, буде короткочасним. Реактивна сила діє лише доти, доки триває закінчення повітря.
Мал. 5.4
Головна особливість реактивної сили полягає в тому, що вона виникає без будь-якої взаємодії із зовнішніми тілами. Відбувається лише взаємодія між ракетою і струменем речовини, що з неї випливає.
Сила, що повідомляє прискорення автомобілю або пішоходу на землі, пароплаву на воді або гвинтовому літаку в повітрі, виникає тільки за рахунок взаємодії цих тіл із землею, водою або повітрям.
При закінченні продуктів згоряння палива вони за рахунок тиску в камері згоряння набувають деяку швидкість щодо ракети і, отже, деякий імпульс. Тому відповідно до закону збереження імпульсу сама ракета отримує такий самий за модулем імпульс, але направлений у протилежний бік.
Маса ракети з часом зменшується. Ракета у польоті є тілом змінної маси. Для розрахунку її руху зручно застосувати закон збереження імпульсу.
Рівняння Мещерського
Виведемо рівняння руху ракети та знайдемо вираз для реактивної сили. Вважатимемо, що швидкість газів, що випливають з ракети, щодо ракети постійна і дорівнює . Зовнішні сили на ракету не діють: вона знаходиться в космічному просторі далеко від зірок та планет.
Нехай у певний момент часу швидкість ракети щодо інерційної системи, пов'язаної із зірками, дорівнює (рис. 5.5 а), а маса ракети дорівнює М. Через малий інтервал часу Δt маса ракети стане рівною
![]()
де μ - Витрата палива(1).

Мал. 5.5
За цей проміжок часу швидкість ракети зміниться на Δ і стане рівною 1 = + Δ. Швидкість закінчення газів щодо обраної інерційної системи відліку дорівнює + (рис. 5.5,б), оскільки до початку згоряння паливо мало ту ж швидкість, що й ракета.
Запишемо закон збереження імпульсу для системи ракета - газ:
Розкривши дужки, отримаємо:
Доданком μΔtΔ можна знехтувати порівняно з іншими, так як воно містить добуток двох малих величин (це величина, як кажуть, другого порядку малості). Після приведення подібних членів матимемо:
![]()
Це одне із рівнянь Мещерського(2) для руху тіла змінної маси, отримане ним 1897 р.
Якщо ввести позначення р = -μ, то рівняння (5.4.1) збігатиметься за формою запису з другим законом Ньютона. Однак маса тіла М тут не постійна, а зменшується з часом через втрату речовини.
Розмір р = -μ зветься реактивної сили. Вона з'являється внаслідок закінчення газів з ракети, прикладена до ракети і протилежно спрямована швидкості газів щодо ракети. Реактивна сила визначається лише швидкістю закінчення газів щодо ракети та витратою палива. Істотно, що вона залежить від деталей пристрою двигуна. Важливо лише, щоб двигун забезпечував витікання газів із ракети зі швидкістю при витраті палива μ. Реактивна сила космічних ракет сягає 1000 кН.
Якщо на ракету діють зовнішні сили, то її рух визначається реактивною силою та сумою зовнішніх сил. У цьому випадку рівняння (5.4.1) запишеться так:
Принцип реактивного руху заснований на тому, що гази, що витікають з реактивного двигуна, отримують імпульс. Такий же за модулем імпульс набуває ракета.
Запитання для самоперевірки

(1) Витратою палива називається відношення маси згорілого палива на час його згоряння.
(2) Мещерський І. В. (1859-1935) – професор Петербурзького політехнічного інституту. Його праці з механіки тіл змінної маси стали теоретичною основою ракетної техніки.
Тяга– рівнодіюча всіх реактивних сил, створюваних агрегатами двигуна, визначається за такою формулою:
де – масова секундна витрата палива реактивного двигуна; W a– швидкість газового струменя на зрізі сопла; F a- Площа зрізу сопла; р а- Тиск на зрізі сопла; р h- Тиск навколишнього середовища.
Перший член даного рівняння характеризує тягу, створювану з допомогою відкидання від сопла газів і це частина – реактивна сила (статична складова).
Другий член характеризує тягу, яка визначається різницею тисків на зрізі сопла та тиску навколишнього середовища і ця частина – змінна складова реактивної тяги (залежить від висоти польоту).
Реактивний момент
Нехай є ракета з однокамерною руховою установкою (ДК). 
а) Якщо вектор тяги двигуна Рспрямована вздовж осі, то реактивний момент відсутня (рис. 29 а).
б) Якщо вектор тяги (і результуючий вектор тяги для багатокамерної ДК) діє з деяким ексцентриситетом щодо центру тяжіння (рис. 29,б), то в цьому випадку діє реактивний момент.
Аеродинамічні схеми ла
Планером називається конструкція, що об'єднує корпус, крила, органи управління та стабілізації в єдину аеродинамічну схему. Він призначений для створення керуючих сил та розміщення всієї апаратури ракети. Корпус планера зазвичай циліндричної форми, за винятком ракети типу "несучий конус", з конічною (сферичною) головною частиною. Форма корпусу та головної частини вибирається з метою отримання найменшої сили лобового опору ракети при польоті. Матеріалом для корпусу служать легкі міцні метали та сплави
Аеродинамічні поверхні планера служать для створення підйомної та керуючих сил. Підйомна сила, що виникає при взаємодії ракети з повітрям під час її польоту забезпечує утримання ЛА в повітрі. Керуючі сили необхідні зміни напряму польоту ракети.
Розрізняють рухливі та нерухомі аеродинамічні поверхні (АП). Рухливі АП, призначені для керування польотом та стабілізацією ЛА, називаються кермами, поворотними крилами. Свої функції вони виконують шляхом повороту навколо осей, перпендикулярних до поздовжньої осі корпусу ракети, або при висуванні з корпусу на певний час і в певній послідовності.
Нерухомі АП служать для стабілізації польоту ЛА (стабілізатори) та створення підйомної сили (несучі крила, поверхні). За взаємним розташуванням кермів і нерухомих аеродинамічних поверхонь можна виділити такі аеродинамічні схеми ракет (рис.30):
Нормальна чи звичайна;
- «Безхвостка»;
- "Поворотне крило";
У нормальній схемі керма і стабілізатор розташовуються за крилами в хвостовій частині ракети.
Схема "безхвостка". Ця схема є різновидом нормальної схеми. Тут крила виконують одночасно функції крил і стабілізаторів і відрізняються більшою стрілоподібністю та малим розмахом. З метою збільшення підйомної сили у цій схемі збільшено площу крил. При цьому кермо виявляється розташованим безпосередньо за крилами і зв'язується з ними конструктивно.
В аеродинамічній схемі "качка" керма знаходяться в головній частині ракети (попереду центру мас), а крила, що виконують і функцію стабілізатора, розташовані в хвостовій частині корпусу ракети. Ця схема зручна з погляду компонування ракети, так як кермові машинки можуть бути розташовані близько до кермів. При такому компонуванні ракети підйомна сила керма збігається у напрямку з підйомною силою крил і корпусу. Однак розташування кермів у носовій частині ракети та виникнення скосу повітряного потоку при відхиленні кермів призводить до втрати підйомної сили на крилах та виникнення значних моментів крену. Щоб уникнути «моменту косого обдування» крильовий блок робиться обертовим навколо осі ракети, що дозволяє уникнути впливу скосу повітряного потоку на них. 
У схемі «поворотне крило» рухомі поверхні (поворотні крила) розташовуються в районі центру тяжіння і поряд з функцією крила виконують функцію кермів, а нерухомі стабілізатори розташовані в хвостовій частині корпусу.
Мал. 30 Аеродинамічні схеми: а) Нормальна; б) "Безхвостка"; в) "Качка"; г) "Поворотне крило".
Важливо немає кращої аеродинамічної схеми. Вибір схеми аеродинамічного компонування визначається необхідними висотами та далекостями польоту ракети, маневреністю та складом бортової апаратури.
Допис від адміністратора:
Хлопці! Хто давно хотів вивчити англійську?
Переходьте і отримайте два безкоштовні урокиу школі англійської мови SkyEng!
Займаюся там сам – дуже круто. Прогрес очевидний.
У додатку можна вивчати слова, тренувати аудіювання та вимову.
Спробуйте. Два уроки безкоштовно за моїм посиланням!
Тисніть
Силу тягиможна визначити через корисну потужність і швидкість транспортного засобу (v):
Для автомобіля, що піднімається в гірку, яка має ухил, маса автомобіля m сила тяги (FT) увійде до рівняння:
де a – прискорення, з яким рухається автомобіль.
Одиниці виміру сили тяги
Основною одиницею вимірювання сили у системі СІ є: =Н
У СГС: = Дін
Формула сили тяги
У тому випадку, якщо тіло при переміщенні має прискорення, то на нього, крім усіх інших, обов'язково діє деяка сила, яка є силою тяги в даний момент часу. Насправді, якщо тіло рухається прямолінійно та з постійною швидкістю, то сила тяги також діє, оскільки тіло має долати сили опору. Зазвичай силу тяги знаходять, розглядаючи сили, що діють на тіло, знаходячи рівнодію і застосовуючи другий закон Ньютона. Жорстко певної формули для сили тяги немає.
Не слід вважати, що сила тяги, наприклад, транспортного засобу діє з боку двигуна, тому що внутрішні сили не можуть змінювати швидкість системи як єдиного цілого, що суперечило б закону збереження імпульсу. Однак слід зазначити, що для отримання сили тертя спокою необхідного напрямку, мотор обертає колеса, колеса «чіпляються за дорогу» і породжується сила тяги. Теоретично було б можливо не використовувати поняття «сила тяги», а говорити про силу тертя спокою або силу реакції повітря. Але зручніше зовнішні сили, які діють на транспорт ділити на дві частини, при цьому одні сили називати силами тяги, а інші силами опору. Це робиться для того, щоб рівняння руху не втратили свій універсальний вигляд і корисна механічна потужність (P) мала простий вираз:
Приклади розв'язання задач
приклад
Завдання.На автомобіль, що має масу 1 т при його русі по горизонтальній поверхні, діє сила тертя, яка дорівнює =0,1 від сили тяжіння. Якою буде сила тяги, якщо автомобіль рухається із прискоренням 2 м/с?
Рішення.Зробимо малюнок.

Як основу для вирішення задачі використовуємо другий закон Ньютона:
Спроектуємо рівняння (1.1) на осі X та Y:
За умовою завдання:
Підставимо праву частину виразу (1.4) замість сили тертя (1.2), отримаємо:
Переведемо масу в систему СІ m=1т=10 3 кг, проведемо обчислення:
Відповідь. F T =2,98 кН
Головна мета передачі електроенергії – підвищення ефективності роботи мереж. Отже, необхідне зменшення втрат. Основною причиною втрат є реактивна потужність, компенсація якої значно підвищує якість електроенергії.
Реактивна потужність викликає непотрібне нагрівання проводів, перевантажуються електропідстанції. Трансформаторна потужність та кабельні перерізи вимушено піддаються завищенням, мережна напруга знижується.
Поняття про реактивну потужність
Для з'ясування, що таке реактивна потужність, треба визначити інші можливі види потужності. При існуванні в контурі активного навантаження (резистора) відбувається споживання виключно активної потужності, що повністю витрачається на енергоперетворення. Отже, можна сформулювати, що таке активна потужність – та, за якої струм здійснює ефективну роботу.
На постійному струмі відбувається споживання виключно активної потужності, що розраховується відповідно до формули:
Вимірюється у ватах (Вт).
В електроланцюгах зі змінним струмом за наявності активного та реактивного навантаження потужнісний показник підсумовується з двох складових частин: активної та реактивної потужності.
- Ємнісні (конденсатори). Характеризується фазовим випередженням струму проти напругою;
- Індуктивна (котушки). Характеризується фазовим відставанням струму стосовно напруги.

Якщо розглянути контур зі змінним струмом і приєднаним активним навантаженням (обігрівачі, чайники, лампочки з спіраллю, що накалюється), струм і напруга будуть синфазними, а повна потужність, взята в певну тимчасову відсічку, обчислюється шляхом перемноження показників напруги і струму.
Однак, коли схема містить реактивні компоненти, показники напруги і струму не будуть синфазними, а відрізнятимуться на певну величину, що визначається кутом зсуву «φ». Користуючись простою мовою, говориться, що реактивне навантаження повертає стільки енергії в електроланцюг, скільки споживає. В результаті вийде, що для активної потужності споживання показник буде нульовим. Одночасно по ланцюгу протікає реактивний струм, який виконує жодну ефективну роботу. Отже, споживається реактивна потужність.
Реактивна потужність – частина енергії, що дозволяє встановлювати електромагнітні поля, потрібні обладнанням змінного струму.
Розрахунок реактивної потужності ведеться за такою формулою:
Q = U x I x sin φ.
Як одиниця виміру реактивної потужності служить ВАр (вольтампер реактивний).
Вираз для активної потужності:
P = U x I x cos φ.
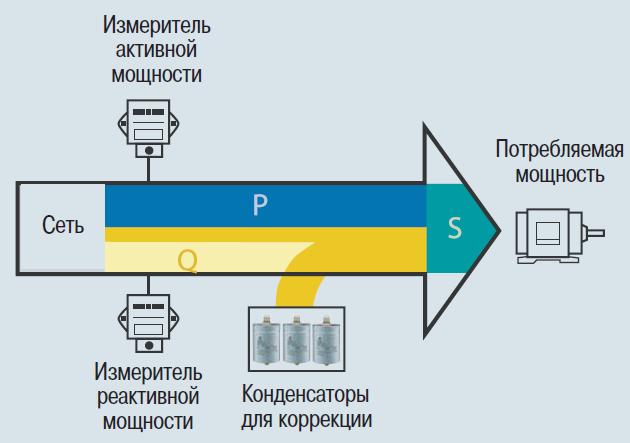
Взаємозв'язок активної, реактивної та повної потужності для синусоїдального струму змінних значень представляється геометрично трьома сторонами прямокутного трикутника, що називається трикутником потужностей. Електроланцюги змінного струму споживають два різновиди енергії: активну потужність і реактивну. Крім того, значення активної потужності ніколи не є негативним, тоді як для реактивної енергії можлива або позитивна величина (при індуктивному навантаженні), або негативна (при ємнісному навантаженні).

Важливо!З трикутника потужностей видно, що завжди корисно зменшити реактивну складову, щоб підвищити ефективність системи.
Повна потужність не знаходиться як алгебраїчна сума активного та реактивного потужності, це векторна сума P і Q. Її кількісне значення обчислюється вилученням квадратного кореня із суми квадратів потужних показників: активного та реактивного. Вимірюватися повна потужність може у ВА (вольтампер) або похідних від нього: кВА, мВА.
Щоб була розрахована повна потужність, необхідно знати різницю фаз між синусоїдальним значенням U і I.
коефіцієнт потужності
Користуючись геометрично представленою векторною картиною, можна знайти відношення сторін трикутника, що відповідають корисній і повній потужності, що дорівнюватиме косінусу фі або потужнісному коефіцієнту:
Цей коефіцієнт знаходить ефективність роботи мережі.
Кількість споживаних ват - те саме, що і кількість споживаних вольтампер при потужнісному коефіцієнті, що дорівнює 1 або 100%.
Важливо!Повна потужність тим ближче до активного показника, чим більше cos φ, або чим менше кут зсуву синусоїдальних величин струму і напруги.
Якщо, наприклад, є котушка, для якої:
- Р = 80 Вт;
- Q = 130 ВАр;
- тоді S = 152,6 BA як середньоквадратичний показник;
- cos φ = P/S = 0,52 або 52%
Можна сказати, що котушка вимагає 130 Вар повної потужності для виконання корисної роботи 80 Вт.
Корекція cos φ
Для корекції cos φ застосовується той факт, що при ємнісному та індуктивному навантаженні вектора реактивної енергії розташовуються в протифазі. Оскільки більшість навантажень є індуктивними, підключивши ємність, можна досягти збільшення cos φ.
Головні споживачі реактивної енергії:
- Трансформатори. Є обмотки, що мають індуктивний зв'язок і за допомогою магнітних полів перетворюючі струми і напруги. Ці апарати є основним елементом електромереж, що передають електроенергію. Особливо збільшуються втрати під час роботи на холостому ходу і за низького навантаження. Широко використовуються трансформатори у виробництві та у побуті;
- Індукційні печі, в яких метали розплавляються шляхом створення в них вихрових струмів;
- Асинхронні двигуни. Найбільший споживач реактивної енергії. Обертальний момент у них створюється за допомогою змінного магнітного поля статора;
- Перетворювачі електроенергії, такі як силові випрямлячі, що використовуються для живлення контактної мережі залізничного транспорту та інші.
Конденсаторні батареї під'єднуються на електропідстанціях, щоб контролювати напругу в межах встановлених рівнів. Навантаження змінюється протягом дня з ранковими та вечірніми піками, а також протягом тижня, знижуючись у вихідні, що змінює показники напруги. Підключенням та відключенням конденсаторів варіюється його рівень. Це робиться від руки та за допомогою автоматики.
Як і де вимірюють cos?
Реактивна потужність перевіряється зі зміни cos спеціальним приладом - фазометром. Його шкала проградуйована в кількісних значеннях cos від нуля до одиниці в індуктивному і ємнісному секторі. Повністю компенсувати негативний вплив індуктивності не вдасться, але можливе наближення до бажаного показника - 0,95 в індуктивній зоні.

Фазометри застосовуються під час роботи з установками, здатними вплинути режим роботи електромережі через регулювання cos φ.
- Оскільки за фінансових розрахунках за спожиту енергію враховується і її реактивна складова, то виробництвах встановлюються автоматичні компенсатори на конденсаторах, ємність яких може змінюватися. У мережах зазвичай використовуються статичні конденсатори;
- При регулюванні cos у синхронних генераторів шляхом зміни збуджуючого струму необхідно його відстежувати візуально в ручних робочих режимах;
- Синхронні компенсатори, що є синхронними двигунами, що працюють без навантаження, в режимі перезбудження видають у мережу енергію, яка компенсує індуктивну складову. Для регулювання збуджуючого струму спостерігають показання cos φ по фазометру.

Корекція коефіцієнта потужності – одне з найефективніших інвестицій скорочення витрат за електроенергію. Одночасно покращується якість одержуваної енергії.
Відео
Реактивна тяга зазвичай розглядається як сила реакції частинок, що відокремлюються. Точкою застосування її вважають центр закінчення - центр зрізу сопла двигуна, а напрямок - протилежний вектору швидкості закінчення продуктів згоряння (або робочого тіла, у разі не хімічного двигуна). Тобто, реактивна тяга:
Енциклопедичний YouTube
1 / 3
✪ Збереження імпульсу: реактивний рух
✪ Урок 106. Реактивний рух
✪ Чи правда, що...?#4-Реактивна тяга?!
Субтитри
Реактивний рух у природі
Доведення
M p ⋅ Δ v → Δ t = − Δ m t Δ t ⋅ u → frac (\Delta m_(t))(\Delta t))\cdot (\vec(u)))
F → p = m p ⋅ a → = − u → ⋅ Δ m t Δ t (\displaystyle (\vec (F))_(p)=m_(p)\cdot (\vec (a))=-(\vec (u))\cdot (\frac (\Delta m_(t))(\Delta t)))
Рівняння Мещерського
Якщо ж на ракету, крім реактивної сили F → p (\displaystyle (\vec (F))_(p)), діє зовнішня сила F → (\displaystyle (\vec (F))), то рівняння динаміки руху набуде вигляду:
M p ⋅ Δ v → Δ t = F → + F → p ? F))+(\vec (F))_(p)\Leftrightarrow ) m p ⋅ Δ v → Δ t = F → + (− u → ⋅ Δ m t Δ t) (\displaystyle m_(p)\cdot (\frac (\Delta (\vec (v))) =(\vec (F))+(-(\vec (u))\cdot (\frac (\Delta m_(t))(\Delta t))))
Формула Мещерського є узагальненням



