Referat. Закон сохранения импульса. Расчет реактивной силы (тяги) Применение реактивных двигателей
-
Любую задачу в механике можно решить с помощью законов Ньютона. Однако применение закона сохранения импульса во многих случаях значительно упрощает решение. Большое значение имеет закон сохранения импульса для исследования реактивного движения.
Какое движение называется реактивным?
Под реактивным движением понимают движение тела, возникающее при отделении некоторой его части с определенной скоростью относительно тела, например при истечении продуктов сгорания из сопла реактивного летательного аппарата. При этом появляется так называемая реактивная сила, сообщающая телу ускорение.
Наблюдать реактивное движение очень просто. Надуйте детский резиновый шарик и отпустите его. Шарик стремительно взовьется вверх (рис. 5.4). Движение, правда, будет кратковременным. Реактивная сила действует лишь до тех пор, пока продолжается истечение воздуха.
Рис. 5.4
Главная особенность реактивной силы состоит в том, что она возникает без какого-либо взаимодействия с внешними телами. Происходит лишь взаимодействие между ракетой и вытекающей из нее струей вещества.
Сила же, сообщающая ускорение автомобилю или пешеходу на земле, пароходу на воде или винтовому самолету в воздухе, возникает только за счет взаимодействия этих тел с землей, водой или воздухом.
При истечении продуктов сгорания топлива они за счет давления в камере сгорания приобретают некоторую скорость относительно ракеты и, следовательно, некоторый импульс. Поэтому в соответствии с законом сохранения импульса сама ракета получает такой же по модулю импульс, но направленный в противоположную сторону.
Масса ракеты с течением времени убывает. Ракета в полете является телом переменной массы. Для расчета ее движения удобно применить закон сохранения импульса.
Уравнение Мещерского
Выведем уравнение движения ракеты и найдем выражение для реактивной силы. Будем считать, что скорость вытекающих из ракеты газов относительно ракеты постоянна и равна . Внешние силы на ракету не действуют: она находится в космическом пространстве вдали от звезд и планет.
Пусть в некоторый момент времени скорость ракеты относительно инерциальной системы, связанной со звездами, равна (рис. 5.5, а), а масса ракеты равна М. Через малый интервал времени Δt масса ракеты станет равной
![]()
где μ - расход топлива(1).

Рис. 5.5
За этот лее промежуток времени скорость ракеты изменится на Δ и станет равной 1 = + Δ. Скорость истечения газов относительно выбранной инерциальной системы отсчета равна + (рис. 5.5,б), так как до начала сгорания топливо имело ту же скорость, что и ракета.
Запишем закон сохранения импульса для системы ракета - газ:
Раскрыв скобки, получим:
Слагаемым μΔtΔ можно пренебречь по сравнению с остальными, так как оно содержит произведение двух малых величин (это величина, как говорят, второго порядка малости). После приведения подобных членов будем иметь:
![]()
Это одно из уравнений Мещерского(2) для движения тела переменной массы, полученное им в 1897 г.
Если ввести обозначение р = -μ, то уравнение (5.4.1) совпадет по форме записи со вторым законом Ньютона. Однако масса тела М здесь не постоянна, а убывает со временем из-за потери вещества.
Величина р = -μ носит название реактивной силы. Она появляется вследствие истечения газов из ракеты, приложена к ракете и направлена противоположно скорости газов относительно ракеты. Реактивная сила определяется лишь скоростью истечения газов относительно ракеты и расходом топлива. Существенно, что она не зависит от деталей устройства двигателя. Важно лишь, чтобы двигатель обеспечивал истечение газов из ракеты со скоростью при расходе топлива μ. Реактивная сила космических ракет достигает 1000 кН.
Если на ракету действуют внешние силы, то ее движение определяется реактивной силой и суммой внешних сил. В этом случае уравнение (5.4.1) запишется так:
Принцип реактивного движения основан на том, что истекающие из реактивного двигателя газы получают импульс. Такой же по модулю импульс приобретает ракета.
Вопросы для самопроверки

(1) Расходом топлива называется отношение массы сгоревшего топлива ко времени его сгорания.
(2) Мещерский И. В. (1859-1935) - профессор Петербургского политехнического института. Его труды по механике тел переменной массы стали теоретической основой ракетной техники.
Тяга – равнодействующая всех реактивных сил, создаваемых агрегатами двигателя, определяется по формуле:
где – массовый секундный расход топлива реактивного двигателя;W a – скорость газовой струи на срезе сопла; F a – площадь среза сопла; р а – давление на срезе сопла; р h – давление окружающей среды.
Первый член данного уравнения характеризует тягу, создаваемую за счет отбрасывания от сопла газов и эта часть – реактивная сила (статическая составляющая).
Второй член характеризует тягу, которая определяется разностью давлений на срезе сопла и давления окружающей среды и эта часть – переменная составляющая реактивной тяги (зависит от высоты полета).
Реактивный момент
Пусть
есть ракета с однокамерной двигательной
установкой (ДУ) рис.29:
а) Если вектор тяги двигателя Р направлена вдоль оси, то реактивный момент отсутствует (рис. 29,а).
б) Если вектор тяги (и результирующий вектор тяги для многокамерной ДУ) действует с некоторым эксцентриситетом относительно центра тяжести (рис. 29,б), то в этом случае действует реактивный момент .
Аэродинамические схемы ла
Планером называется конструкция, объединяющая корпус, крылья, органы управления и стабилизации в единую аэродинамическую схему. Он предназначен для создания управляющих сил и размещения всей аппаратуры ракеты. Корпус планера обычно цилиндрической формы, за исключением ракеты типа «несущий конус», с конической (сферической) головной частью. Форма корпуса и головной части выбирается в целях получения наименьшей силы лобового сопротивления ракеты при полете. Материалом для корпуса служат легкие прочные металлы и сплавы
Аэродинамические поверхности планера служат для создания подъемной и управляющих сил. Подъемная сила, которая возникает при взаимодействии ракеты с воздухом во время ее полета, обеспечивает удержание ЛА в воздухе. Управляющие силы необходимы для изменения направления полета ракеты.
Различают подвижные и неподвижные аэродинамические поверхности (АП). Подвижные АП, предназначенные для управления полетом и стабилизацией ЛА, называются рулями, поворотными крыльями. Свои функции они выполняют путем поворота вокруг осей, перпендикулярных продольной оси корпуса ракеты, либо при выдвижении из корпуса на определенное время и в определенной последовательности.
Неподвижные АП служат для стабилизации полета ЛА (стабилизаторы) и для создания подъемной силы (несущие крылья, поверхности). По взаимному расположению рулей и неподвижных аэродинамических поверхностей можно выделить следующие аэродинамические схемы ракет (рис.30):
Нормальная или обычная;
- «бесхвостка»;
- «поворотное крыло»;
В нормальной схеме рули и стабилизатор располагаются позади крыльев в хвостовой части ракеты.
Схема «бесхвостка». Данная схема является разновидностью нормальной схемы. Здесь крылья выполняют одновременно функции крыльев и стабилизаторов и отличаются большей стреловидностью и малым размахом. С целью увеличения подъемной силы в этой схеме увеличена площадь крыльев. При этом рули оказываются расположенными непосредственно за крыльями и связываются с ними конструктивно.
В
аэродинамической схеме «утка» рули
находятся в головной части ракеты
(впереди центра масс), а крылья, выполняющие
и функцию стабилизатора, расположены
в хвостовой части корпуса ракеты. Эта
схема удобна с точки зрения компоновки
ракеты, так как рулевые машинки могут
быть расположены близко к рулям. При
такой компоновке ракеты подъемная сила
рулей совпадает по направлению с
подъемной силой крыльев и корпуса.
Однако расположение рулей в носовой
части ракеты и возникновение скоса
воздушного потока при отклонении рулей
приводит к потере подъемной силы на
крыльях и возникновению значительных
моментов крена. Чтобы избежать «момента
косой обдувки» крыльевой блок делается
вращающимся вокруг оси ракеты, что
позволяет избежать воздействия скоса
воздушного потока на них.
В схеме «поворотное крыло» подвижные поверхности (поворотные крылья) располагаются в районе центра тяжести и наряду с функцией крыла выполняют функцию рулей, а неподвижные стабилизаторы расположены в хвостовой части корпуса.
Рис. 30 Аэродинамические схемы: а)Нормальная; б)"Бесхвостка"; в)"Утка"; г)"Поворотное крыло".
Принципиально не существует наилучшей аэродинамической схемы. Выбор схемы аэродинамической компоновки определяется требуемыми высотами и дальностями полета ракеты, маневренностью и составом бортовой аппаратуры.
Сообщение от администратора:
Ребята! Кто давно хотел выучить английский?
Переходите по и получите два бесплатных урока
в школе английского языка SkyEng!
Занимаюсь там сам - очень круто. Прогресс налицо.
В приложении можно учить слова, тренировать аудирование и произношение.
Попробуйте. Два урока бесплатно по моей ссылке!
Жмите
Силу тяги можно определить через полезную мощность, и скорость транспортного средства (v):
Для автомобиля, поднимающегося в горку, которая имеет уклон , масса автомобиля m сила тяги (F T) войдет в уравнение:
где a – ускорение, с которым движется автомобиль.
Единицы измерения силы тяги
Основной единицей измерения силы в системе СИ является: =Н
В СГС: =дин
Формула силы тяги
В том случае, если тело при перемещении имеет ускорение, то на него кроме всех прочих обязательно действует некоторая сила, которая является силой тяги в рассматриваемый момент времени. В действительности, если тело движется прямолинейно и с постоянной скоростью, то сила тяги также действует, так как тело должно преодолевать силы сопротивления. Обычно силу тяги находят, рассматривая силы, действующие на тело, находя равнодействующую и применяя второй закон Ньютона. Жестко определенной формулы для силы тяги не существует.
Не следует считать, что сила тяги, например, транспортного средства действует со стороны двигателя, так как внутренние силы не могут менять скорость системы как единого целого, что входило бы в противоречие с законом сохранения импульса. Однако следует отметить, что для получения у силы трения покоя необходимого направления, мотор вращает колеса, колеса «цепляются за дорогу» и порождается сила тяги. Теоретически было бы возможно не использовать понятие «сила тяги», а говорить о силе трения покоя или силе реакции воздуха. Но удобнее внешние силы, которые действуют на транспорт делить на две части, при этом одни силы называть силами тяги , а другие — силами сопротивления . Это делается для того, чтобы уравнения движения не потеряли свой универсальный вид и полезная механическая мощность (P) имела простое выражение:
Примеры решения задач
Пример
Задание. На автомобиль имеющий массу 1 т при его движении по горизонтальной поверхности, действует сила трения, которая равна =0,1 от силы тяжести. Какой будет сила тяги, если автомобиль движется с ускорением 2 м/с?
Решение. Сделаем рисунок.

В качестве основы для решения задачи используем второй закон Ньютона:
Спроектируем уравнение (1.1) на оси X и Y:
По условию задачи:
Подставим правую часть выражения (1.4) вместо силы трения в (1.2), получим:
Переведем массу в систему СИ m=1т=10 3 кг, проведем вычисления:
Ответ. F T =2,98 кН
Главная цель при передаче электроэнергии – повышение эффективности работы сетей. Следовательно, необходимо уменьшение потерь. Основной причиной потерь является реактивная мощность, компенсация которой значительно повышает качество электроэнергии.
Реактивная мощность вызывает ненужный нагрев проводов, перегружаются электроподстанции. Трансформаторная мощность и кабельные сечения вынужденно подвергаются завышениям, сетевое напряжение снижается.
Понятие о реактивной мощности
Для выяснения, что же такое реактивная мощность, надо определить другие возможные виды мощности. При существовании в контуре активной нагрузки (резистора) происходит потребление исключительно активной мощности, полностью расходуемой на энергопреобразование. Значит, можно сформулировать, что такое активная мощность, – та, при которой ток совершает эффективную работу.
На постоянном токе происходит потребление исключительно активной мощности, рассчитываемой соответственно формуле:
Измеряется в ваттах (Вт).
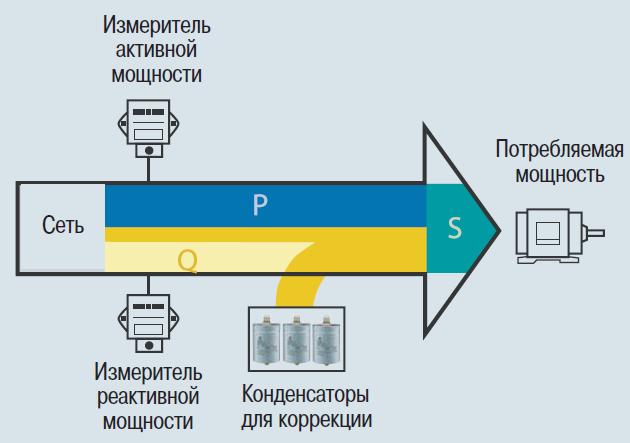
В электроцепях с переменным током при наличии активной и реактивной нагрузки мощностной показатель суммируется из двух составных частей: активной и реактивной мощности.
- Емкостная (конденсаторы). Характеризуется фазовым опережением тока по сравнению с напряжением;
- Индуктивная (катушки). Характеризуется фазовым отставанием тока по отношению к напряжению.

Если рассмотреть контур с переменным током и подсоединенной активной нагрузкой (обогреватели, чайники, лампочки с накаливающейся спиралью), ток и напряжение будут синфазными, а полная мощность, взятая в определенную временную отсечку, вычисляется путем перемножения показателей напряжения и тока.
Однако когда схема содержит реактивные компоненты, показатели напряжения и тока не будут синфазными, а будут различаться на определенную величину, определяемую углом сдвига «φ». Пользуясь простым языком, говорится, что реактивная нагрузка возвращает столько энергии в электроцепь, сколько потребляет. В результате получится, что для активной мощности потребления показатель будет нулевой. Одновременно по цепи протекает реактивный ток, не выполняющий никакую эффективную работу. Следовательно, потребляется реактивная мощность.
Реактивная мощность – часть энергии, которая позволяет устанавливать электромагнитные поля, требуемые оборудованием переменного тока.
Расчет реактивной мощности ведется по формуле:
Q = U x I x sin φ.
В качестве единицы измерения реактивной мощности служит ВАр (вольтампер реактивный).
Выражение для активной мощности:
P = U x I x cos φ.
Взаимосвязь активной, реактивной и полной мощности для синусоидального тока переменных значений представляется геометрически тремя сторонами прямоугольного треугольника, называемого треугольником мощностей. Электроцепи переменного тока потребляют две разновидности энергии: активную мощность и реактивную. Кроме того, значение активной мощности никогда не является отрицательным, тогда как для реактивной энергии возможна либо положительная величина (при индуктивной нагрузке), либо отрицательная (при емкостной нагрузке).

Важно! Из треугольника мощностей видно, что всегда полезно снизить реактивную составляющую, чтобы повысить эффективность системы.
Полная мощность не находится как алгебраическая сумма активного и реактивного мощностного значения, это векторная сумма P и Q. Ее количественное значение вычисляется извлечением квадратного корня из суммы квадратов мощностных показателей: активного и реактивного. Измеряться полная мощность может в ВА (вольтампер) или производных от него: кВА, мВА.
Чтобы была рассчитана полная мощность, необходимо знать разность фаз между синусоидальными значениям U и I.
Коэффициент мощности
Пользуясь геометрически представленной векторной картиной, можно найти отношение сторон треугольника, соответствующих полезной и полной мощности, что будет равно косинусу фи или мощностному коэффициенту:
Данный коэффициент находит эффективность работы сети.
Количество потребляемых ватт – то же самое, что и количество потребляемых вольтампер при мощностном коэффициенте, равном 1 или 100%.
Важно! Полная мощность тем ближе к показателю активной, чем больше cos φ, или чем меньше угол сдвига синусоидальных величин тока и напряжения.
Если, к примеру, имеется катушка, для которой:
- Р = 80 Вт;
- Q = 130 ВАр;
- тогда S = 152,6 BA как среднеквадратичный показатель;
- cos φ = P/S = 0,52 или 52%
Можно сказать, что катушка требует 130 ВАр полной мощности для выполнения полезной работы 80 Вт.
Коррекция cos φ
Для коррекции cos φ применяется тот факт, что при емкостной и индуктивной нагрузке вектора реактивной энергии располагаются в противофазе. Так как большинство нагрузок является индуктивными, подключив емкость, можно добиться увеличения cos φ.
Главные потребители реактивной энергии:
- Трансформаторы. Представляют собой обмотки, имеющие индуктивную связь и посредством магнитных полей преобразуюшие токи и напряжения. Эти аппараты являются основным элементом электросетей, передающих электроэнергию. Особенно увеличиваются потери при работе на холостом ходу и при низкой нагрузке. Широко используются трансформаторы в производстве и в быту;
- Индукционные печи, в которых расплавляются металлы путем создания в них вихревых токов;
- Асинхронные двигатели. Крупнейший потребитель реактивной энергии. Вращающий момент в них создается посредством переменного магнитного поля статора;
- Преобразователи электроэнергии, такие как силовые выпрямители, используемые для питания контактной сети железнодорожного транспорта и другие.
Конденсаторные батареи подсоединяются на электроподстанциях для того, чтобы контролировать напряжение в пределах установленных уровней. Нагрузка меняется в течение дня с утренними и вечерними пиками, а также на протяжении недели, снижаясь в выходные, что изменяет показатели напряжения. Подключением и отключением конденсаторов варьируется его уровень. Это делается от руки и с помощью автоматики.
Как и где измеряют cos φ
Реактивная мощность проверяется по изменению cos φ специальным прибором – фазометром. Его шкала проградуирована в количественных значениях cos φ от нуля до единицы в индуктивном и емкостном секторе. Полностью скомпенсировать негативное влияние индуктивности не удастся, но возможно приближение к желаемому показателю – 0,95 в индуктивной зоне.

Фазометры применяются при работе с установками, способными повлиять на режим работы электросети через регулирование cos φ.
- Так как при финансовых расчетах за потребленную энергию учитывается и ее реактивная составляющая, то на производствах устанавливаются автоматические компенсаторы на конденсаторах, емкость которых может меняться. В сетях, как правило, используются статические конденсаторы;
- При регулировании cos φ у синхронных генераторов путем изменения возбуждающего тока необходимо его отслеживать визуально в ручных рабочих режимах;
- Синхронные компенсаторы, представляющие собой синхронные двигатели, работающие без нагрузки, в режиме перевозбуждения выдают в сеть энергию, которая компенсирует индуктивную составляющую. Для регулирования возбуждающего тока наблюдают за показаниями cos φ по фазометру.

Коррекция коэффициента мощности – одна из эффективнейших инвестиций для сокращения затрат на электроэнергию. Одновременно улучшается качество получаемой энергии.
Видео
Реактивная тяга обычно рассматривается как сила реакции отделяющихся частиц. Точкой приложения её считают центр истечения - центр среза сопла двигателя, а направление - противоположное вектору скорости истечения продуктов сгорания (или рабочего тела, в случае не химического двигателя). То есть, реактивная тяга :
Энциклопедичный YouTube
1 / 3
✪ Сохранение импульса: реактивное движение
✪ Урок 106. Реактивное движение
✪ А правда ли, что...?#4-Реактивная тяга?!
Субтитры
Реактивное движение в природе
Доказательство
M p ⋅ Δ v → Δ t = − Δ m t Δ t ⋅ u → {\displaystyle m_{p}\cdot {\frac {\Delta {\vec {v}}}{\Delta t}}=-{\frac {\Delta m_{t}}{\Delta t}}\cdot {\vec {u}}}
F → p = m p ⋅ a → = − u → ⋅ Δ m t Δ t {\displaystyle {\vec {F}}_{p}=m_{p}\cdot {\vec {a}}=-{\vec {u}}\cdot {\frac {\Delta m_{t}}{\Delta t}}}
Уравнение Мещерского
Если же на ракету , кроме реактивной силы F → p {\displaystyle {\vec {F}}_{p}} , действует внешняя сила F → {\displaystyle {\vec {F}}} , то уравнение динамики движения примет вид:
M p ⋅ Δ v → Δ t = F → + F → p ⇔ {\displaystyle m_{p}\cdot {\frac {\Delta {\vec {v}}}{\Delta t}}={\vec {F}}+{\vec {F}}_{p}\Leftrightarrow } m p ⋅ Δ v → Δ t = F → + (− u → ⋅ Δ m t Δ t) {\displaystyle m_{p}\cdot {\frac {\Delta {\vec {v}}}{\Delta t}}={\vec {F}}+(-{\vec {u}}\cdot {\frac {\Delta m_{t}}{\Delta t}})}
Формула Мещерского представляет собой обобщение